IMX-Forge 快速入门指南
5分钟快速体验 i.MX6ULL 嵌入式 Linux 系统构建
目录
📸 实测成果
项目已在正点原子阿尔法 i.MX6ULL 开发板上完成 SD 卡启动与 UUU + UMS eMMC 启动的实测。完整的串口启动日志见下方 验证成功 章节。
开发板 LCD 点屏实测 —— 系统启动后成功点亮 7 寸 LCD(1024×600):
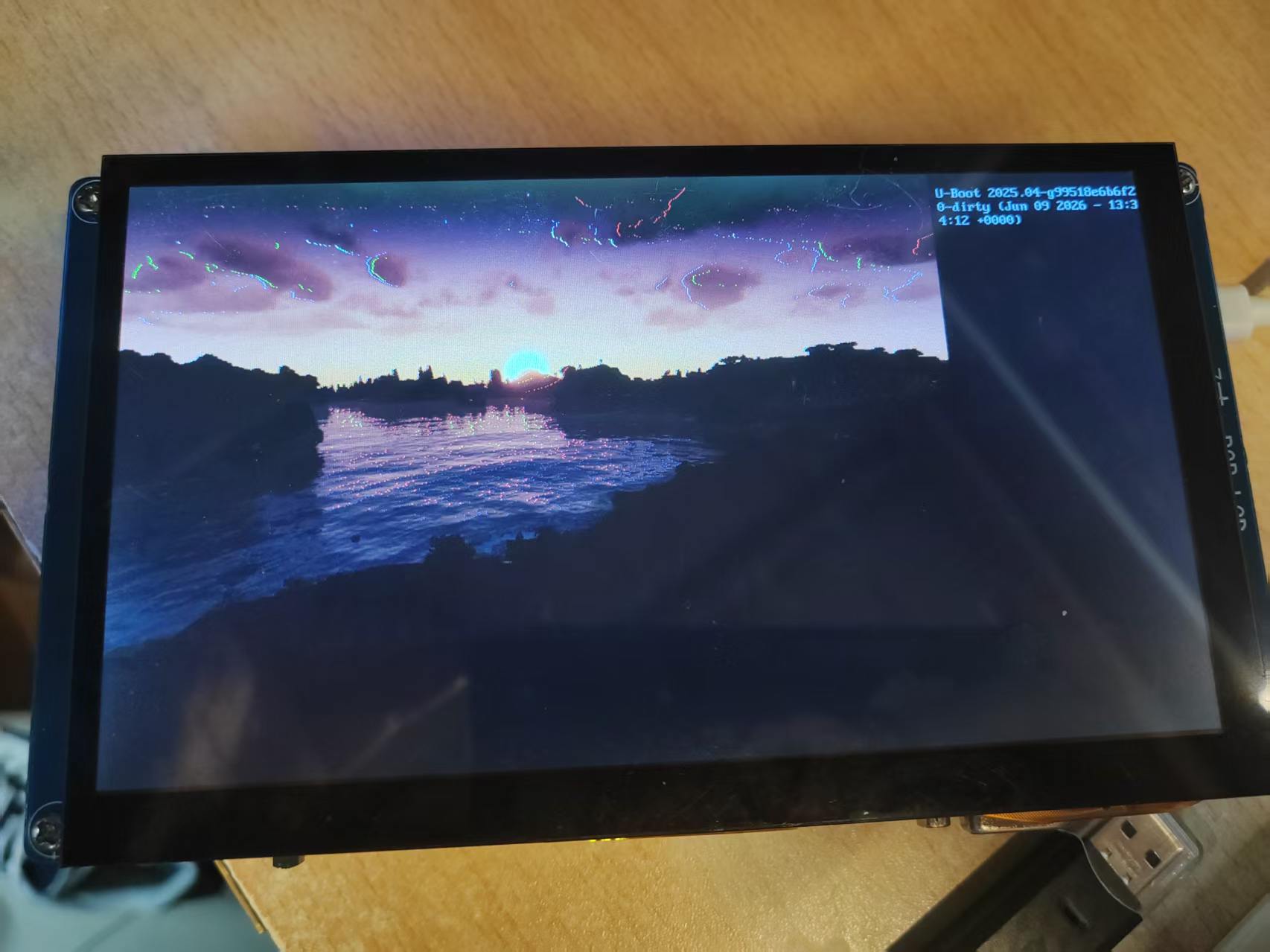
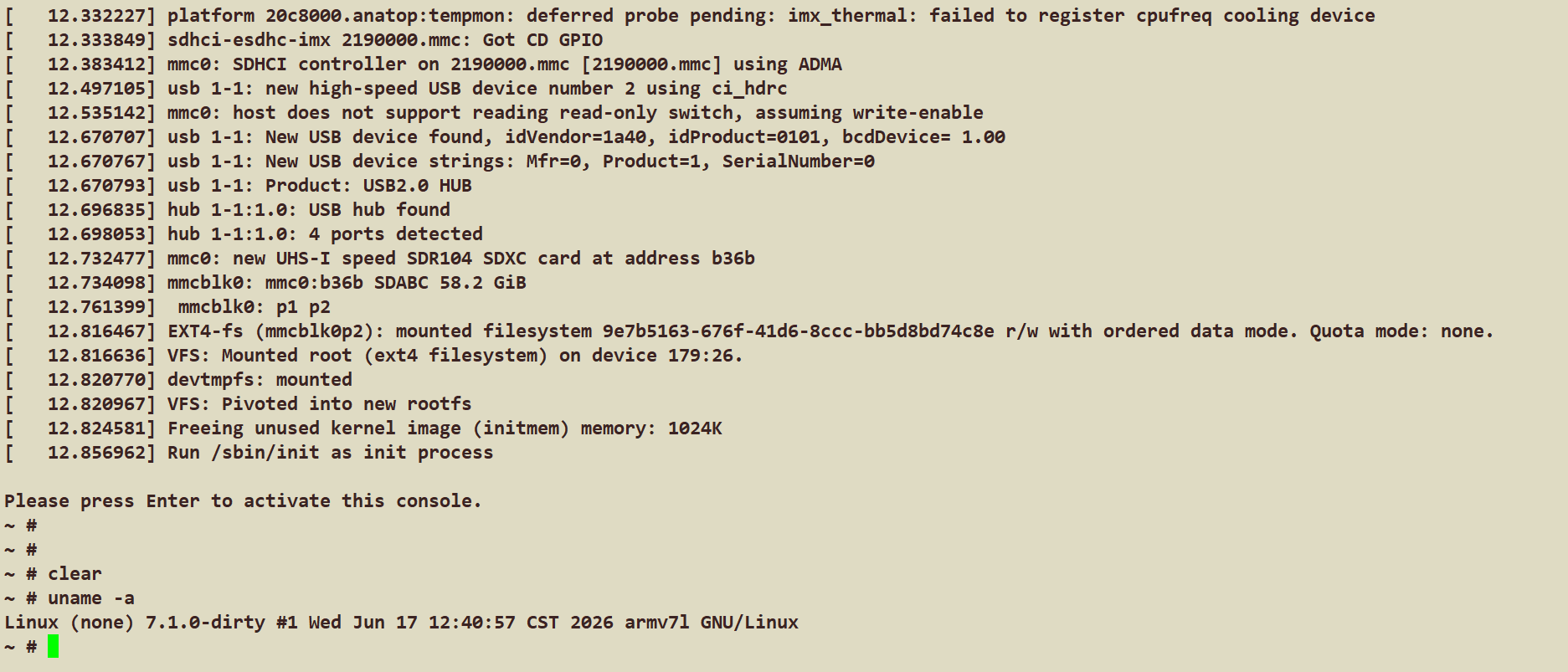
主线内核 Linux 7.1 启动实测 —— 上游主线内核已在板子上跑起来(对应文中的「双轨内核策略」):
开发方式选择
在开始之前,请选择适合您的开发方式:
| 开发方式 | 推荐人群 | 优点 | 缺点 |
|---|---|---|---|
| Docker 环境 | 新手、Windows 用户、国内用户 | • 5分钟快速开始 • 环境统一无依赖问题 • 跨平台支持 • 国内优化加速 | • 需要安装 Docker • 需要熟悉基本 Docker 命令 |
| 主机环境 | Linux 用户、高级开发者 | • 直接访问硬件 • 性能略优 • 更灵活的调试 | • 工具链配置复杂 • 可能遇到依赖冲突 • 国内下载较慢 |
推荐: 新手和国内用户优先选择 Docker 环境。
如何使用本指南:
- Docker 用户: 请跳转到 Docker 快速开始
- 主机环境用户: 请继续阅读 环境准备 章节
项目概述
IMX-Forge 是什么
IMX-Forge 是一个面向 NXP i.MX6ULL 开发板的开源构建系统,它将通常散落在各处的嵌入式开发资源整合在一起:
- 补丁管理 —— 基于
format-patch的双轨补丁管理(当前自动应用脚本按文件名选择最新 patch;series机制属于后续增强方向) - 构建脚本 —— 一键构建 U-Boot、Linux NXP BSP 内核、BusyBox Rootfs;Mainline 由独立脚本和 CI 负责验证
- 教程文档 —— 从工具链到系统调试的完整学习路径
- 第三方源码 —— Git Submodule 管理的 U-Boot、Linux、BusyBox、QT 编译流水线
能做什么
┌─────────────────────────────────────────────────────────────┐
│ IMX-Forge 构建流程 │
├─────────────────────────────────────────────────────────────┤
│ │
│ 交叉编译工具链 (ARM GNU Toolchain 15.2) │
│ ↓ │
│ U-Boot (NXP uboot-imx) → u-boot-dtb.imx │
│ ↓ │
│ Linux Kernel (双轨支持) │
│ ├── linux-imx (NXP BSP 6.12.3,默认系统构建轨) → zImage + .dtb │
│ └── linux_mainline (上游内核,CI 验证轨) → zImage + .dtb │
│ ↓ │
│ BusyBox Rootfs → 最小文件系统 │
│ ↓ │
│ SD/eMMC 镜像 → 可烧录的完整系统 │
│ │
│ [可选] QT 应用 → qt-compile-pipeline │
│ │
└─────────────────────────────────────────────────────────────┘双轨内核策略
patches/
├── [linux-imx] NXP BSP 6.12.3 ← 稳定推荐
└── [mainline] 上游内核 ← 已完成迁移- linux-imx:NXP 官方 BSP,稳定可靠,驱动支持完善,是默认系统构建轨
- mainline:上游主线内核,长期维护,可向上游贡献,项目通过 CI 构建验证持续兼顾
适合谁
- 嵌入式开发新手 —— 想学习嵌入式 Linux 但不知道从何入手
- i.MX6ULL 开发者 —— 需要快速搭建开发环境,避免重复造轮子
- 自制板移植者 —— 需要参考成熟的设备树和补丁配置
- 学习者 —— 想理解完整的嵌入式 Linux 启动链条
- QT 应用开发者 —— 需要 QT6 交叉编译环境和触摸屏支持
Docker 快速开始
本章节适合使用 Docker 开发环境的用户。如果您选择主机环境开发,请跳过本章节。
前置要求
- Docker: 20.10+ (安装指南: https://docs.docker.com/get-docker/)
- 磁盘空间: 至少 5GB 可用空间
- 内存: 建议 4GB 以上可用内存
国内用户优化
如果您在中国大陆,建议先配置 Docker 镜像加速器:
cd docker
sudo bash setup-mirror.sh # 一键配置国内镜像源构建 Docker 镜像
# 进入项目目录
cd /path/to/imx-forge/docker
# 国内用户使用优化的 Dockerfile
DOCKER_BUILDKIT=1 docker build -f Dockerfile.cn -t imx-forge:latest .
# 国际用户使用标准 Dockerfile
DOCKER_BUILDKIT=1 docker build -t imx-forge:latest .构建时间约 5-10 分钟(取决于网络速度)。
运行容器
# 返回项目根目录
cd ..
# 运行容器(挂载项目目录)
docker run -it --rm \
-v $(pwd):/workspace \
-w /workspace \
imx-forge:latest如果需要使用 USB 设备(烧录):
docker run -it --rm \
--privileged \
-v /dev:/dev \
-v $(pwd):/workspace \
-w /workspace \
imx-forge:latest验证环境
进入容器后,验证工具链:
arm-none-linux-gnueabihf-gcc --version预期输出:
arm-none-linux-gnueabihf-gcc (GNU Toolchain for the Arm Architecture 15.2.Rel1) 15.2.1 20250409开始编译
在容器内执行:
# 一键构建所有组件
./scripts/release-all.sh
# 或分步构建
./scripts/build_helper/build-uboot.sh
./scripts/build_helper/build-linux.sh
./scripts/build_helper/build-busybox.sh输出文件
编译产物在 out/ 目录,与主机环境相同。容器退出后文件仍保留在主机上。
下一步
Docker 用户可以直接跳转到 快速构建 章节,构建流程与主机环境完全相同。
常见问题
- Q: 镜像构建失败? 检查网络连接,国内用户使用 Dockerfile.cn
- Q: 容器内无法访问 USB? 使用
--privileged -v /dev:/dev参数 - Q: 编译产物权限问题? Docker 容器使用 ubuntu 用户(UID 1000),如有问题请查看 docker/README.md
详细文档请参考 docker/README.md。
环境准备
支持的开发环境
IMX-Forge 在以下环境中测试通过:
| 环境 | 状态 | 备注 |
|---|---|---|
| WSL2 (Ubuntu 22.04/24.04) | ✅ 推荐 | Windows 用户首选,需切换 mirrored 网络模式 |
| Ubuntu 22.04+ | ✅ 推荐 | 原生 Linux 环境 |
硬件要求
开发主机
- CPU: 4核心以上(编译时间约15-30分钟)
- 内存: 8GB 以上
- 磁盘: 20GB 可用空间
i.MX6ULL 开发板
- 芯片: NXP i.MX6ULL (Cortex-A7, 528MHz)
- 存储: eMMC 或 SD 卡(建议 Class 10,至少 4GB)
- 串口: UART1(默认波特率 115200)
- 网络: 以太网(可选,用于 TFTP/NFS 网络启动)
必备配件
- USB 转 TTL 串口模块(CP2102/CH340/FT232 等)
- 杜邦线(连接串口)
- SD 卡读卡器
- 网线(可选)
软件依赖安装
Ubuntu / WSL2
# 更新软件源
sudo apt update
# 安装基础构建工具
sudo apt install -y build-essential gcc make bc bison flex
# 安装设备树编译器
sudo apt install -y device-tree-compiler
# 安装 SSL 和加密库
sudo apt install -y libssl-dev libgnutls28-dev
# 安装 ncurses(用于 menuconfig)
sudo apt install -y libncurses-dev
# 安装 Python 和工具
sudo apt install -y python3 python3-pyelftools swig
# 安装串口工具
sudo apt install -y picocom minicom
# 安装其他有用工具
sudo apt install -y git wget tree rsync安装 ARM 交叉编译工具链
IMX-Forge 使用 ARM 官方的 GNU Toolchain 15.2:
# 下载工具链(约 350MB)
cd ~
wget https://developer.arm.com/-/media/Files/downloads/gnu/15.2.rel1/binrel/arm-gnu-toolchain-15.2.rel1-x86_64-arm-none-linux-gnueabihf.tar.xz
# 解压
tar -xf arm-gnu-toolchain-15.2.rel1-x86_64-arm-none-linux-gnueabihf.tar.xz
# 安装到 /opt 目录
sudo mv arm-gnu-toolchain-15.2.rel1-x86_64-arm-none-linux-gnueabihf /opt/arm-gnu-toolchain
# 配置 PATH
echo 'export PATH=/opt/arm-gnu-toolchain/bin:$PATH' >> ~/.bashrc
source ~/.bashrc
# 验证安装
arm-none-linux-gnueabihf-gcc --version预期输出:
arm-none-linux-gnueabihf-gcc (GNU Toolchain for the Arm Architecture 15.2.Rel1) 15.2.1 20250409
Copyright (C) 2025 Free Software Foundation, Inc.获取项目
克隆项目
IMX-Forge 使用 Git Submodule 管理第三方源码,需要使用 --recurse-submodules 参数:
# 克隆项目并初始化子模块
git clone --recurse-submodules https://github.com/Awesome-Embedded-Learning-Studio/imx-forge.git
# 或如果已经克隆,更新子模块
cd imx-forge
git submodule update --init --recursive项目结构
imx-forge/
├── scripts/ # 构建脚本
│ ├── build_helper/ # 主构建脚本
│ │ ├── build-uboot.sh
│ │ ├── build-linux.sh # NXP BSP 内核
│ │ ├── build-mainline-linux.sh # 主线内核
│ │ └── build-busybox.sh
│ ├── release-all.sh # 一键构建所有组件
│ └── patch_maker.sh # 补丁生成工具
├── third_party/ # 第三方源码(子模块)
│ ├── uboot-imx/ # U-Boot NXP fork
│ ├── linux-imx/ # Linux Kernel NXP BSP
│ ├── linux_mainline/ # Linux Kernel 上游主线
│ ├── busybox/ # BusyBox
│ └── qt-compile-pipeline/ # QT 交叉编译流水线
├── patches/ # 补丁文件(按轨道分目录)
│ ├── linux-imx/ # NXP BSP 内核补丁
│ ├── linux_mainline/ # 主线内核补丁
│ └── uboot-imx/ # U-Boot 补丁
├── driver/ # 驱动源码与板级设备树
│ ├── device_tree/alpha-board/ # 板级设备树(.dts)
│ ├── base_driver/ # 基础驱动框架
│ ├── example-driver/ # 示例驱动
│ ├── firmwares/ # 固件
│ └── NN_tutorial_*/ # 各驱动教程对应源码(LED/按键/蜂鸣器…)
├── examples/ # 示例工程
│ └── qt/ # QT 应用示例
├── rootfs/ # 根文件系统
│ ├── src/ # rootfs 构建源
│ └── overlay/ # Overlay 叠加目录
├── out/ # 编译输出目录
├── develop/ # 开发工具
├── tools/ # 辅助工具
└── document/ # 文档和教程(本网站源文件)Docker 用户注意: Docker 镜像已包含工具链,无需手动安装 ARM GNU Toolchain。但项目仍需要克隆子模块以获取 U-Boot、Linux 内核等源码。
快速构建
方式一:一键构建(推荐)
IMX-Forge 提供了一键构建脚本,自动完成 U-Boot、Linux 内核和 BusyBox 的编译:
cd /path/to/imx-forge
# 一键构建所有组件(NXP BSP 内核)
./scripts/release-all.sh
# 或指定只构建某一阶段
./scripts/release-all.sh --stage 1 # 只构建 U-Boot
./scripts/release-all.sh --stage 2 # 只构建内核
./scripts/release-all.sh --stage 3 # 只构建 BusyBox
./scripts/release-all.sh --stage 4 # 只完成 RootFS构建过程解析
1. U-Boot 构建
$ ./scripts/build_helper/build-uboot.sh输出示例:
[INFO] Starting U-Boot build for mx6ull_aes_emmc_defconfig
[INFO] ========================================
[INFO] Checking host dependencies...
✓ build-essential
✓ gcc
✓ make
✓ device-tree-compiler
...
[INFO] Checking toolchain...
Toolchain found: arm-none-linux-gnueabihf-gcc (GNU Toolchain for the Arm Architecture 15.2.Rel1) 15.2.1
[INFO] All checks passed, starting build...
[INFO] Running distclean...
[INFO] Configuring U-Boot with mx6ull_aes_emmc_defconfig...
[INFO] Building U-Boot...
...
[INFO] Verifying build artifacts in /home/charliechen/imx-forge/out/uboot...
✓ u-boot: ARM
Entry: 0x87800000
✓ u-boot.bin: 613888 bytes
✓ u-boot.dtb: i.MX6ULL device tree detected
✓ u-boot-dtb.imx: Image Type: ARM Linux Firmware Image (uncompressed)
[INFO] Build completed successfully!关键产物:
out/uboot/u-boot-dtb.imx—— 可烧录的 U-Boot 镜像
2. Linux 内核构建(NXP BSP)
$ ./scripts/build_helper/build-linux.sh输出示例:
[INFO] Starting Linux kernel build for imx_aes_defconfig
[INFO] Checking host dependencies...
[INFO] Checking toolchain...
...
[INFO] Building Linux kernel...
Kernel: arch/arm/boot/zImage is ready
DTC arch/arm/boot/dts/imx6ull-14x14-evk-emmc.dtb
...
[INFO] Build completed successfully!
[INFO] Kernel artifacts in /home/charliechen/imx-forge/out/linux:
✓ vmlinux (ELF kernel)
✓ arch/arm/boot/zImage (compressed kernel)
✓ System.map (symbol table)关键产物:
out/linux/arch/arm/boot/zImage—— 内核镜像out/linux/arch/arm/boot/dts/imx6ull-14x14-evk-emmc.dtb—— 设备树
3. Linux 内核构建(Mainline 主线)
$ ./scripts/build_helper/build-mainline-linux.sh使用主线内核时,defconfig 为 imx_aes_mainline_defconfig,输出目录为 out/mainline/linux/。
4. BusyBox Rootfs 构建
$ ./scripts/build_helper/build-busybox.sh输出示例:
[INFO] Building BusyBox...
[INFO] Installing BusyBox to /home/charliechen/imx-forge/rootfs/nfs...
[INFO] Verifying build artifacts...
✓ busybox: ELF 32-bit LSB executable, ARM, EABI5
✓ Symlinks in bin/: 100+关键产物:
rootfs/nfs/—— 完整的根文件系统目录
方式二:分步构建(用于调试)
如果想更精细地控制构建过程,可以手动执行每一步:
U-Boot 手动构建
# 设置环境变量
export ARCH=arm
export CROSS_COMPILE=arm-none-linux-gnueabihf-
# 进入源码目录
cd third_party/uboot-imx
# 配置
make mx6ull_aes_emmc_defconfig O=../../out/uboot
# 编译(使用 8 个并行任务)
make -j8 O=../../out/ubootLinux 内核手动构建(NXP BSP)
# 设置环境变量
export ARCH=arm
export CROSS_COMPILE=arm-none-linux-gnueabihf-
# 进入源码目录
cd third_party/linux-imx
# ⚠️ 应用 IMX-Forge 补丁(包含 imx_aes_defconfig)
git apply ../../patches/linux-imx/linux-imx-latest.patch
# 配置(使用 IMX-Forge 自定义的 imx_aes_defconfig)
make imx_aes_defconfig O=../../out/linux
# 如需自定义配置
make menuconfig O=../../out/linux
# 编译
make -j8 O=../../out/linux注意:
imx_aes_defconfig是 IMX-Forge 项目自定义配置,需要先应用补丁。如果你想使用 NXP 官方配置,请改用imx_v7_defconfig。
Linux 内核手动构建(Mainline)
# 设置环境变量
export ARCH=arm
export CROSS_COMPILE=arm-none-linux-gnueabihf-
# 进入源码目录
cd third_party/linux_mainline
# 配置
make imx_aes_mainline_defconfig O=../../out/mainline/linux
# 如需自定义配置
make menuconfig O=../../out/mainline/linux
# 编译
make -j8 O=../../out/mainline/linuxBusyBox 手动构建
# 设置环境变量
export ARCH=arm
export CROSS_COMPILE=arm-none-linux-gnueabihf-
# 进入源码目录
cd third_party/busybox
# 配置
make defconfig O=../../out/busybox
# 编译并安装
make -j8 O=../../out/busybox
make install O=../../out/busybox CONFIG_PREFIX=../../rootfs/nfs烧录启动
硬件连接
1. 串口连接
使用 USB 转 TTL 模块连接开发板 UART1:
| USB转TTL | i.MX6ULL | 线色 |
|---|---|---|
| GND | GND | 黑 |
| TX | RX | 白 |
| RX | TX | 绿 |
注意: TX 接 RX,RX 接 TX(交叉连接)
2. 打开串口终端
# 查看串口设备
ls /dev/ttyUSB*
# 使用 picocom 打开串口(波特率 115200)
picocom -b 115200 /dev/ttyUSB0picocom 快捷键:
- 退出:
Ctrl + A→Ctrl + Q - 清屏:
Ctrl + A→Ctrl + L
SD 卡烧录方案
1. 准备 SD 卡
# 查看 SD 卡设备(请确认设备名!)
lsblk
# 假设 SD 卡是 /dev/sdX(替换 X 为实际设备)
sudo fdisk -l /dev/sdX2. 分区
# 卸载所有分区
sudo umount /dev/sdX*
# 使用 fdisk 分区
sudo fdisk /dev/sdX在 fdisk 交互界面执行:
o # 创建新的 DOS 分区表
n # 新建分区
p # 主分区
1 # 分区号
# 默认起始扇区
+100M # 分区大小 100MB(boot 分区)
t # 修改分区类型
c # W95 FAT32 (LBA)
n # 新建分区
p # 主分区
2 # 分区号
# 默认起始扇区
# 默认结束扇区(剩余所有空间,rootfs 分区)
w # 写入分区表并退出3. 格式化分区
# 格式化 boot 分区为 FAT32
sudo mkfs.vfat -F 32 /dev/sdX1
# 格式化 rootfs 分区为 EXT4
sudo mkfs.ext4 /dev/sdX24. 挂载分区
# 创建挂载点
sudo mkdir -p /mnt/imx-boot
sudo mkdir -p /mnt/imx-root
# 挂载分区
sudo mount /dev/sdX1 /mnt/imx-boot
sudo mount /dev/sdX2 /mnt/imx-root5. 复制文件
# 复制内核和设备树到 boot 分区
sudo cp out/linux/arch/arm/boot/zImage /mnt/imx-boot/
sudo cp out/linux/arch/arm/boot/dts/imx6ull-14x14-evk-emmc.dtb /mnt/imx-boot/
# 复制 rootfs 到 root 分区
sudo cp -r rootfs/nfs/* /mnt/imx-root/
# 同步并卸载
sync
sudo umount /mnt/imx-boot /mnt/imx-root6. 烧录 U-Boot
# 烧录 U-Boot 到 SD 卡(跳过第一个扇区)
sudo dd if=out/uboot/u-boot-dtb.imx of=/dev/sdX bs=1K seek=1 conv=notrunc
sync警告: dd 命令具有破坏性,请务必确认设备名正确!
eMMC 烧录方案
方法一:通过 U-Boot 烧录
- 先用 SD 卡启动板子
- 在 U-Boot 命令行执行:
=> mmc dev 1 0 # 切换到 eMMC
=> mmc part # 查看 eMMC 分区
=> tftp 0x82000000 u-boot-dtb.imx # 通过 TFTP 下载 U-Boot
=> mmc write 0x82000000 0x2 0x800 # 写入 eMMC(偏移 1KB)方法二:使用 NXP UUU 工具
# 安装 UUU
sudo apt install libusb-1.0-0-dev
git clone https://github.com/NXPmicro/mfgtools
cd mfgtools
cmake . && make
sudo make install
# 烧录
sudo uuu u-boot-dtb.imx验证成功
U-Boot 启动验证
给板子上电,串口终端应显示:
U-Boot 2025.04-00017-gXXXXXXX (Mar 15 2026 - 10:30:00 +0800)
CPU: Freescale i.MX6ULL rev1.1 528 MHz
Reset cause: POR
Model: Freescale i.MX6ULL 14x14 EVK Board
DRAM: 512 MiB
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Loading Environment from MMC... OK
In: serial
Out: serial
Err: serial
Net: ethernet@02188000
Hit any key to stop autoboot... 3 2 1Linux 内核启动验证
U-Boot 启动后,应看到内核日志:
Starting kernel ...
[ 0.000000] Booting Linux on physical CPU 0x0
[ 0.000000] Linux version 6.12.3 (charliechen@ubuntu) (arm-none-linux-gnueabihf-gcc 15.2.1) #1 SMP PREEMPT
[ 0.000000] CPU: ARMv7 Processor [410fc075] revision 5 (ARMv7), cr=10c5387d
[ 0.000000] OF: fdt: Machine model: Freescale i.MX6ULL 14x14 EVK Board
[ 0.000000] Memory: 512MiB/512MiB available
...
[ 2.345678] console [ttymxc0] enabled
[ 2.678901] VFS: Mounted root (ext4 filesystem) readonly on device 179:2.Rootfs 挂载验证
内核启动完成后,应看到:
Please press Enter to activate this console.按回车后,出现登录提示符:
/ #系统功能验证
/ # uname -a
Linux imx6ull 6.12.3 #1 SMP PREEMPT armv7l GNU/Linux
/ # free -h
total used free shared buff/cache available
Mem: 487Mi 24Mi 440Mi 1.0Mi 22Mi 456Mi
/ # cat /proc/cpuinfo | grep Processor
Processor : ARMv7 Processor rev 5 (v7l)
/ # ls /dev/mmc*
/dev/mmcblk0 /dev/mmcblk0p1 /dev/mmcblk0p2常见问题
问题 1: 串口无输出或乱码
症状: 上电后串口完全无输出,或输出乱码。
原因:
- TX/RX 接反
- 波特率不匹配
- 串口设备选择错误
- 驱动问题
解决方法:
# 检查串口连接(TX-RX, RX-TX)
# 尝试不同波特率
picocom -b 9600 /dev/ttyUSB0 # 试试 9600
picocom -b 115200 /dev/ttyUSB0 # 标准波特率
# 检查串口设备
ls /dev/ttyUSB* /dev/ttyACM*
# 如果是 WSL2,可能需要 USB 转发
# 参考: https://learn.microsoft.com/en-us/windows/wsl/connect-usb问题 2: 编译报错 "command not found"
症状: 运行构建脚本时提示某个命令不存在。
示例输出:
[ERROR] Cross compiler 'arm-none-linux-gnueabihf-gcc' not found!解决方法:
# 检查 PATH 配置
echo $PATH | grep arm-gnu-toolchain
# 手动添加 PATH
export PATH=/opt/arm-gnu-toolchain/bin:$PATH
# 验证工具链
arm-none-linux-gnueabihf-gcc --version
# 如果仍然失败,重新安装工具链(参考"环境准备"章节)问题 3: U-Boot 启动后卡住
症状: U-Boot 启动到一半就停止了。
示例输出:
U-Boot 2025.04...
CPU: Freescale i.MX6ULL rev1.1 528 MHz
DRAM: 512 MiB可能原因:
- 环境变量加载失败
- 设备树问题
- 存储设备初始化失败
解决方法:
=> printenv # 查看环境变量
=> printenv bootcmd # 查看启动命令
=> reset # 复位重启
# 如果环境变量损坏,恢复默认值
=> env default -a
=> saveenv问题 4: 内核启动报错 "VFS: Cannot open root device"
症状: 内核启动过程中报错无法挂载根文件系统。
示例输出:
[ 2.345678] VFS: Cannot open root device "mmcblk0p2" or unknown-block(179,2)
[ 2.456789] Please append a correct "root=" boot option解决方法:
=> printenv bootargs
=> setenv bootargs "console=ttymxc0,115200 root=/dev/mmcblk0p2 rootfstype=ext4 rootwait rw"
=> saveenv
# 检查分区是否存在
=> mmc part问题 5: WSL2 网络无法 ping 通开发板
症状: 在 WSL2 中无法与开发板网络通信。
原因: WSL2 默认 NAT 模式会隔离开发板网络。
解决方法:
- 在 Windows 上创建
.wslconfig文件:
[wsl2]
networkingMode=mirrored- 重启 WSL:
wsl --shutdown
wsl- 验证网络:
# 在 WSL 中应该能看到与 Windows 相同的网卡
ip addr
# 测试 ping 开发板
ping 192.168.1.100 # 替换为开发板 IP问题 6: 子模块初始化失败
症状: git submodule update 报错。
解决方法:
# 方法一:递归初始化
git submodule update --init --recursive
# 方法二:单独初始化失败的模块
cd third_party/linux_mainline
git checkout master
cd ../..
git submodule update --remote --merge问题 7: 串口设备权限被拒绝(Permission denied)
症状: 访问 /dev/ttyUSB* 时提示 Permission denied,或 picocom 打开串口失败。
原因: 串口设备默认归属于 dialout 组,普通用户没有读写权限。
解决方法: 把当前用户加入 dialout 组:
sudo usermod -aG dialout $USER
# 需要重新登录(或执行 newgrp dialout)后生效下一步
恭喜!你已经成功构建并运行了第一个嵌入式 Linux 系统。
接下来你可以:
深入学习 —— 阅读项目教程文档
自定义配置 —— 根据你的需求修改系统
- 使用
make menuconfig自定义内核配置 - 修改设备树适配你的硬件
- 扩展 rootfs 添加更多功能
- 使用
网络开发 —— 设置 TFTP/NFS 提高开发效率
- 参考 kernel 网络启动教程
驱动开发 —— 学习编写 Linux 驱动程序
- 参考 驱动开发教程
QT 应用开发 —— 构建 GUI 应用
- 使用 qt-compile-pipeline 交叉编译 QT6
参考资料
- 项目主页 —— GitHub 仓库
- 项目规划 —— 待办事项
- U-Boot 官方文档
- Linux 内核文档
- BusyBox 官方网站
技术支持
遇到问题?请:
快速入门指南 —— 让嵌入式 Linux 开发变得简单
Copyright © 2026 IMX-Forge Project. MIT License.